Rust async 简介
在讲 Tokio 之前,不得不先讲一下 Rust 的异步编程,因为和很多语言不太一样。
对于 Rust Async 熟悉的可以跳过这章
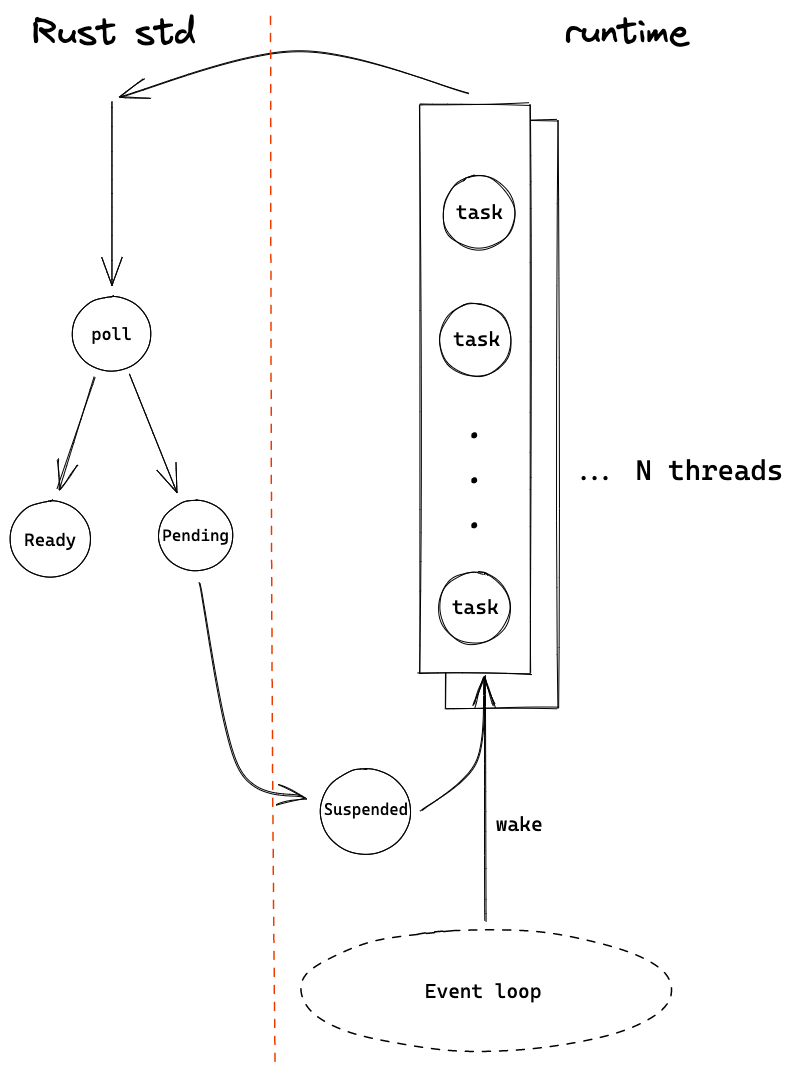
对于 Erlang/Go/Nodejs 等语言,异步 runtime 都是内置于语言本身,开箱即用。但 Rust 作为一门系统级语言,并不想局限于一种实现,于是另辟蹊径,提供了 Future/async/await 等基本功能,实现了类似于 Nodejs Promise 的 task ,但把调度和运行 future 交给第三方实现,如 Tokio、async-std。例如下图,左边是 Rust 语言提供的基本功能,驱动了 task 的执行,而右边是第三方 runtime 需要实现的调度机制。
 https://excalidraw.com/#json=5287000177377280,_EjA-elJg02sgC71T8uXLQ
https://excalidraw.com/#json=5287000177377280,_EjA-elJg02sgC71T8uXLQ
Future, async, await
Future 是 Rust 的一个 trait(类似于 interface),表示一个异步任务(task),是"零成本"(zero-cost abstraction)的轻量级线程(类似 promise),会被交给 runtime 调度和执行。Future trait 需要实现 poll 这个方法,在 poll 中判断这个任务是否执行完,如果执行完(比如 IO 数据准备好),就返回 Ready,否则返回 Pending。
我们的代码不会直接调用 poll,而是通过 Rust 的关键字 .await 来执行这个 future,await 会被 Rust 在编译时生成代码来调用 poll,如果返回 Pending 则被 runtime 挂起(比如重新放到任务队列中)。当有 event 产生时,挂起的 future 会被唤醒,Rust 会再次调用 future 的 poll,如果此时返回 Ready 就执行完成。
除了直接实现 Future trait 以外,还可以通过 async 把一个 function 或者一个代码 block 转变为一个 Future。在 async 中可以调用其他 future 的 .await 来等待子 future 变成 Ready 状态。
struct HelloFuture { ready: bool, waker: ... } impl Future for HelloFuture { // 1. custom Future(leaf) fn poll(self: Self, ctx: &mut Context<'_>) -> Poll<()> { if self.ready { Poll::Ready(()) } else { // store waker in ctx somewhere Poll::Pending } } } async fn hello_world() { // 2. generated Future by async println!("before await"); HelloFuture { ready: false }.await; // 3. HelloFuture is pending, then park println!("Hello, world!"); } fn main() { let task = hello_world(); // 4. task is a generated Future // ... reactor code is ignored here, which will wake futures runtime::spawn(task); // 5. task is run by runtime }
例如上边这段代码,HelloFuture 是一个通过实现 Future trait 实现的 Future, hello_world 是 async 函数变成的 Future,并被传入 runtime 来执行(这里 runtime::spawn 只是示例)。hello_world 中又调用了 HelloFuture.await,因为 ready 是 false,所以 hello_world 会被挂起,直到 HelloFuture 被唤醒。
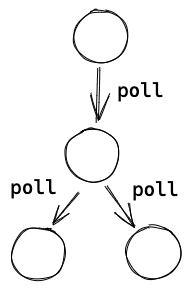
上述的这种嵌套的 futures 可以组成一个 Future 树,一般叶子节点都是由 runtime(如 Tokio) 自己通过实现 Future trait 来实现的,如 io、tcp、time 等操作。非叶子节点则由库代码或用户通过 async 调用不同的子 future 实现的。root future 会被提交给 runtime 来执行,runtime 通过调度器来调用 root future,然后 root 再一级级往下调用 poll。
 https://excalidraw.com/#json=6697978081312768,u9VYjoGonibMqcPX8VWeGg
https://excalidraw.com/#json=6697978081312768,u9VYjoGonibMqcPX8VWeGg
生成状态机和 stackless
Future 会被 Rust 编译为一个状态机的代码,当执行到子 Future 的 await 的时候,会进入下一个状态,所以下次执行时可以从 await 的地方继续执行。因此 Rust 不需要预先为 future 分配独立的栈(stackless),是 zero-cost abstraction。但也因为如此,future 只能在 await 的地方调度走,是 cooperation scheduling(协同调度),而且很难做抢占式调度,这点和 stackful 的 Go/Erlang 不一样。状态机的示意伪代码如下:
#![allow(unused)] fn main() { use std::{future::Future, task::Poll}; enum HelloWorldState { Start, Await1(HelloFuture), Done, } impl Future for HelloWorldState { type Output = (); fn poll(&mut self: HelloWorldState, ctx: &mut Context<'_>) -> Poll<Output> { match self { HelloWorldState::Start => { println!("before await"); // code before await let hello = HelloFuture { ready: false }; *self = HelloWorldState::Await1(hello); self.poll(); // re-poll after first state change }, HelloWorldState::Await1(hello) => { match hello.poll(ctx) { // await by poll Poll::Pending => { Poll::Pending }, Poll::Ready(output) => { println!("Hello, world!"); // code after await *self = HelloWorldState::Done; let output = (); Poll::Ready(output) } } }, HelloWorldState::Done => { panic!("can't go here") } } } } }
在这段示意代码中, async fn hello_world() 被变成了一个 enum 的状态和它的 poll 方法,初始状态为 Start,第一次执行 poll 时会执行 .await 之前的代码,并改变当前状态为 Await1 。下次再被 poll 时,因为状态是 Await1,会进入第二个分支并执行 hello.poll(),如果 hello 还没完成,会返回 Pending,否则会执行 .await 之后的代码。
可以看到,Rust 主要提供了这些基础的工具和代码生成,而如何管理 OS 线程、如何调度任务、如何 poll events、如何唤醒 pending 的 tasks 等等,都需要 runtime 自己实现,可以实现为一个类似于 Erlang/Go 的 N:M 模型,也可以实现 Nodejs 这样单线程事件驱动的模型。
需要注意的是,如果使用了 async,很多标准库中的同步阻塞的库就不应该直接使用,否则会阻塞其他 task 的调度和运行。比如执行 std::println! 或者执行纯 CPU 计算的时候,因为没有 .await 这样的 yield point,所以无法被调度走,当前 OS 线程必须等到这个操作完成,执行到下一个 yield point 后,才能执行其他 task,这段时间内这个 OS 线程中的任务都被阻塞了。
一般 runtime 会封装好一些常用的模块,如 IO/TCP/timer 等等,写代码时注意使用 runtime 封装的而不用标准库的就行。像 Tokio 这样的 runtime 还提供了专门用来运行这类阻塞操作的专用线程池(类似于 Erlang 的 dirty scheduler),从而不影响 reactor 或者其他 task 的执行。